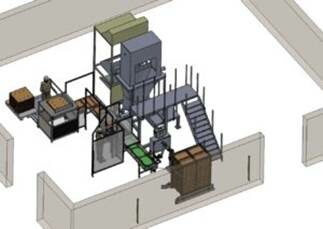
Lignes de Remplissage, Chargement et Déchargement
Deux lignes constituent le projet :
- Une ligne de remplissage de barquettes en carton et de chargement de chariots en amont d’une phase d’étuvage,
- Une ligne de déchargement des mêmes chariots en sortie de l’étuvage.
Ligne de remplissage
Sur la première ligne, les barquettes vides sont récupérées en sortie d’une barquetteuse. Elles sont acheminées jusqu’à un poste de chargement en granulats ou broyats végétaux.
Ligne de déconditionnement
Sur l’autre ligne, les chariots remplis de barquettes carton contenant le broyat végétal précédemment étuvé sont vidés de leurs cartons. Le broyat est versé dans un conteneur et les cartons sont ensuite acheminés jusqu’à un compacteur pour constituer des ballots. Projet conçu pour répondre aux besoins de l’industrie à Carros.
ASM a conçu et installé plus de 300 machines de production. Voici quelques exemples de réalisations qui pourraient vous intéresser :